Les choses avancent... Je planifie de travailler sur mon automate afin de créer un script de croisement de plusieurs trains. Pour cela, j'ai modifié mon mini-réseau de test pour ajouter deux embranchements. Je vais ainsi pouvoir tester la logique des aiguillages.

Certes, il ne s'agit pas d'une zone de dépassement. Mais le principe est le même: il est possible de gérer plusieurs trains et actionner les aiguillages en fonction des directions de chacun.
Ensuite, il me faut un module de contrôle pour les moteurs d'aiguillages. Voilà qui est fait:
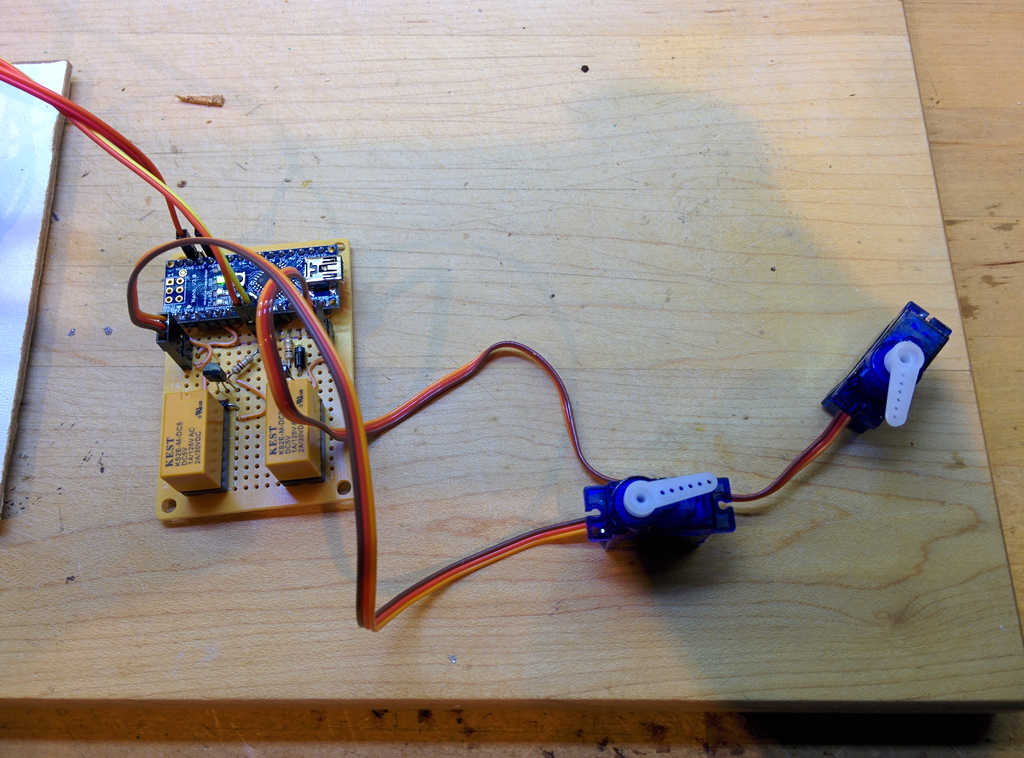
Le principe est simple:
- réception des deux signaux de commande d'aiguillage de l'automate
- déplacement des moteurs (type servo)
- positionnement des relais correspondant afin d'alimenter correctement les pointes de coeurs
Enfin, j'ai aussi ajouté deux accessoires bien pratique sur le clavier de mon automate: un potentiomètre pour la vitesse et un interrupteur trois positions pour les changements de direction (marche avant-stop-marche arrière).

Prochaine étape: installation des moteurs sur le réseau et test...

Aucun commentaire:
Publier un commentaire